Wie der Name schon vermuten lässt (griechisch: $\pi\iota\epsilon\zeta\omega$ = piezo = zusammendrücken), handelt es sich hierbei um druckelektrische Stoffe. Setzt man den Stoff einer Spannung $U_{\rm Piezo}$ aus, so dehnt sich dieser dann um die Länge $\Delta L$ aus (reziproker piezoelektrischer Effekt). Umgekehrt resultiert aus einer Verformung der Länge $\Delta L$ eine Spannung $U_{\rm Piezo}$ (direkter piezoelektrischer Effekt). Piezoelektrische Stoffe haben dabei immer eine Vorzugsrichtung, die durch ihren Polarisationsvektor gegeben ist. Der Effekt tritt nur dann auf, wenn man die Spannung in Richtung des Polarisationsvektors anlegt.
Bei einer konstanten Steuerspannung am piezoelektrischen Element ist die Position der Tunnelspitze bezüglich der Probe nicht fixiert. Ursache hierfür sind die unterschiedlichen Wärmeausdehnungskoeffizienten der verwendeten Materialien und die aus Temperaturschwankungen (z.B. geöffnetes Fenster, Körperwärme, Klimaanlage) resultierende Ausdehnung. Es ist im Allgemeinen darauf zu achten, dass gut miteinander harmonierende Materialien verwendet werden. Diese müssen aber nicht nur den Aspekten der Wärmeausdehnung genügen, sondern auch anderen Anforderungen - wie der Schwingungsdämpfung - gerecht werden.
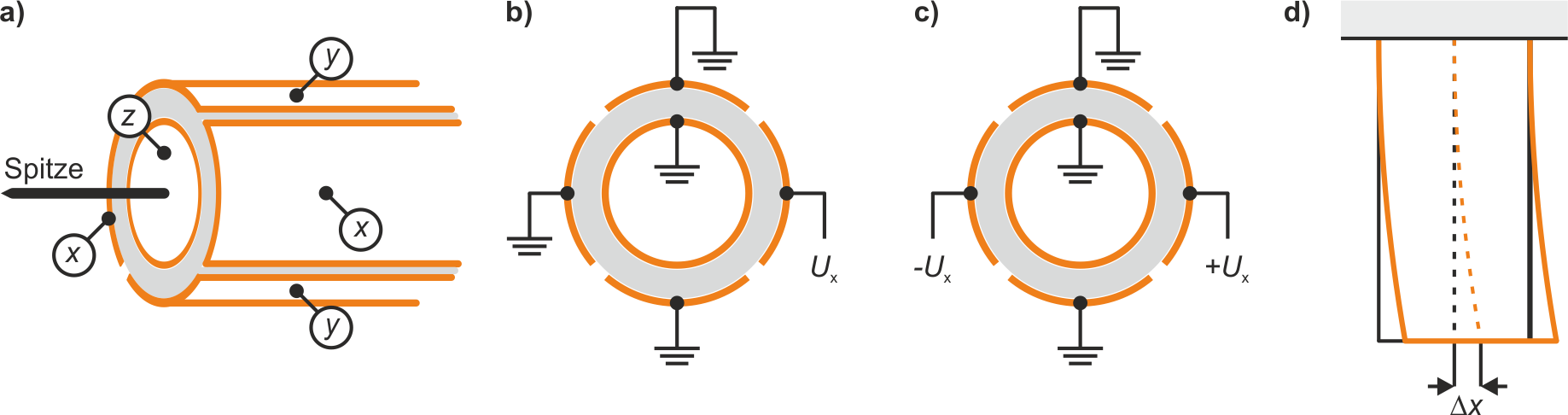
Es gibt verschiedene Alternativen, eine Bewegung der Spitze in alle drei Dimensionen des Raumes zu ermöglichen. Eine kompakte Variante bietet die piezoelektrische Röhre (Abb. 1a). Diese besteht aus einem Hohlzylinder piezoelektrischen Materials, welcher radial polarisiert ist, d.h. der Polarisationsvektor verläuft radial. Der Hohlzylinder ist an den Innen- und Außenflächen metallisiert, wobei die Metallisierung der Außenflächen in 4 Segmente unterteilt ist. Dadurch entstehen insgesamt 5 Elektroden. Wird z.B. die gleiche Spannung an die äußeren Elektroden angelegt, während das Innere der Röhre geerdet ist, so resultiert daraus eine Längenänderung $\Delta L$: $$ \Delta L = d_{31} {L \over h} U_{\rm Piezo}$$ mit der Röhrenlänge $L$, ihrer Wanddicke $h$ und dem (materialabhängigen) Piezomodul $d_{31}$. Wird an ein äußeres Elektrodensegment eine Spannung angelegt, so wird sich die Röhre verbiegen, da sich nur eine Seite der Röhre ausdehnt. Diese Betriebsweise nennt sich unipolarer Modus (Abb. 1b). Um die laterale ($x$, $y$) Reichweite und Sensitivität des Scanners zu erhöhen, kann man die Röhre auch im bipolaren Modus betreiben: Hier wird an ein Segment eine positive Spannung angelegt, während an das gegenüberligende Segment die gleiche negative Spannung angelegt wird (Abb. 1c). Dadurch wird die Wand des Hohlzylinders auf der einen Seite dicker und auf der anderen dünner. Der Zylinder verbiegt sich somit stärker (Abb. 1d). Damit lässt sich durch Anlegen von 5 Spannungen ($U^+_x, U^-_x, U^+_y, U^-_y, U_z$) die Spitze in alle drei Raumrichtungen bewegen.
Ein typischer Wert für das Piezomodul bei dem für Rastertunnelmikroskope oft verwendeten Material Blei-Zirkonium-Titanat (PZT) ist $d_{31} = 0.1$ nm/V. Daraus ergibt sich mit dem typischen Länge-zu- Wandstärke-Verhältnis $L/h = 10$ eine Längenänderung von 100 nm bei einer angelegten Spannung von 100 V. Da man bei Hochspannungsverstärkern typischerweise ein Rauschen von einem mV hat, beträgt das entsprechende $z$-Rauschen des Röhrenscanners etwa 1 pm. Die Spitze "wackelt" also um einen Pikometer auf und ab, was in etwa der typischen vertikalen Auflösung eines gut gebauten Rastertunnelmikroskops entspricht.
Da die effektiven geometrischen Größen $L$ und $h$ in einem Rastertunnelmikroskop-Aufbau nur recht ungenau bekannt sind, muss bei einem neu gebauten Rastertunnelmikroskop immer zunächst das Scanner-Röhrchen kalibriert werden. Dies bedeutet, dass man eine Probe mit bekannten Strukturen abbildet. Dann werden die am Röhrenscanner anliegenden Hochspannungen, die zum Auslenken der Spitze um die bekannte Höhe der Stufenkante oder um den bekannten Atomabstand im atomaren Gitter notwendig sind, gemessen und entsprechend kalibriert. Auf diese Weise wird der Faktor $d_{31} {L \over h}$ ermittelt.